PWSZ Racibórz | Pokaż listę wszystkich wiadomości » |
Zobacz projekty raciborskich inżynierów PWSZ!
Przedstawiamy przegląd wybranych projektów inżynierskich zrealizowanych na kierunku automatyka i robotyka w roku akademickim 2014/2015.

Kierunek automatyka i robotyka jest jednym z dwóch kierunków inżynierskich, który jest prowadzony w Państwowej Wyższej Szkole Zawodowej w Raciborzu. Od początku działania kierunku zajęcia prowadzone są z jednej strony przez wykwalifikowaną kadrę, a z drugiej strony przez praktyków. Wysokie kompetencje, jak i profesjonalizm kadry w takich dziedzinach jak automatyka, pomiary, napędy, sterowanie czy wytwarzanie sprawiają, że studenci zdobywają wiedzę praktyczną i są doskonale przygotowani do pracy zawodowej, jak również do kontynuowania studiów na II stopniu. Kadra dydaktyczna podczas prowadzenia zajęć zwraca szczególną uwagę na fakt, że dzisiejszy świat techniki, a szczególnie automatyka dynamicznie się rozwija i należy ciągle poszerzać swą wiedzę, poszukiwać informacji i nowości technicznych. Studenci na ostatnim roku wykonują projekt inżynierski, w którym łączą wiedzę zdobytą podczas studiów z praktyczną realizacją tematu. Do dnia dzisiejszego 162 osoby uzyskały tytuł zawodowy inżyniera automatyki i robotyki, w tym 68 osób studiowało w formie niestacjonarnej. Projekty inżynierskie aż w 80% to konstrukcja oraz wykonanie stanowisk, urządzeń lub maszyn, a tylko 20% realizowanych tematów to zagadnienia teoretyczne bądź symulacje. Na innych uczelniach politechnicznych proporcje te są odwrotne. Potwierdza to, że kierunek automatyka i robotyka PWSZ w Raciborzu już dzisiaj prowadzony jest jako kierunek praktyczny.
Chcieliśmy przybliżyć wybrane tematy i cele zrealizowanych projektów w roku akademickim 2014/2015. W niniejszym roku 23 (9 w formie niestacjonarnej) osoby zakończyły studia na naszym kierunku.
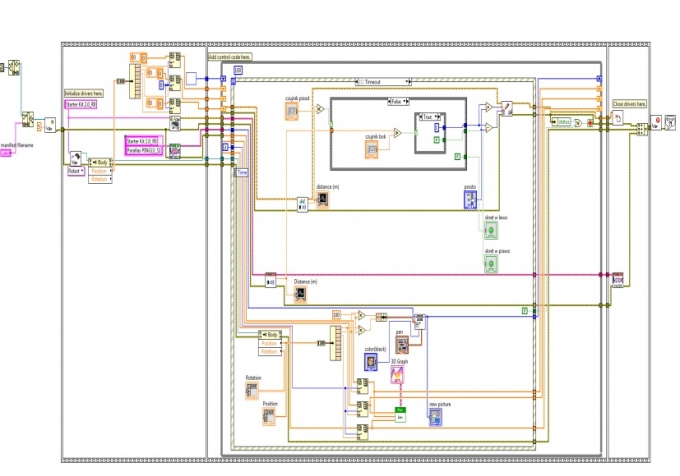
W 2015 roku z sukcesem zakończyła studia na kierunku automatyka i robotyka pierwsza kobieta. Pani inż. Monika Kierek, napisała projekt inżynierski pod opieką dr. inż. Wacława Banasia. Celem pracy było zamodelowanie ruchu robota mobilnego w programie Labview w module Robotics. Robot poruszał się po dwóch planszach. Pierwsza z nich to labirynt, natomiast druga to plansza samodzielnie zaprojektowana w programie graficznym. Zamodelowany ruch robota mobilnego zostanie przedstawiony za pomocą obrazków i wykresów 2D/3D.

Pan inż. Tomasz Pochopień zrealizował projekt pod opieką dr. inż. Piotra Kalusa. Celem projektu było stworzenie ośmiu stanowisk laboratoryjnych, które umożliwią wykonywanie ćwiczeń z zakresu programowania w języku C, to znaczy: napisanie programu w środowisku oprogramowania Keil Vision4, skompilowanie, wysłanie do mikrokontrolera oraz przetestowanie poprawności działania na układach rzeczywistych. Do wykonanych stanowisk wymagany jest dostęp do komputerów klasy PC w celu pisania programów, a następnie przesłania ich do modułu programatora STM Link V2.

Pan inż. Marcin Władarz pod opieką dr inż. Krzysztofa Simka zaprojektował oraz zbudował kontroler procesu parowania efuzyjnego. Urządzenie wykorzystuje algorytm regulacji PID. Zaprojektowany oraz wykonany układ pracuje w oparciu o 8-bitowy mikrokontroler AVR. Sterowanie przepływem prądu grzałki jest zrealizowane na bazie tranzystora MOSFET. Jako interfejs pomiędzy użytkownikiem a urządzeniem służy aplikacja sterująca napisana w języku Java, pozwalająca kontrolować automatyczne procesy regulacji. Alternatywnie, w celu umożliwienia kontroli z pominięciem algorytmu PID, wykonano pilota bezpośrednio sterującego prądem grzałki.

Dr inż. Wacław Banaś był również opiekunem pana inż. Roberta Pastuszko, którego zadaniem było wykonane generatora efektów dźwiękowych ze sterowanym mikrokontrolerem. Jak napisał autor, dzięki jego generatorowi: "możemy bawić się dźwiękiem poprzez przesunięcie w czasie, przesunięcie w fazie, zmianą amplitudy, częstotliwości czy połączenie kilku możliwości. Przykładem nowoczesnych zastosowań są multi-efekty dźwiękowe mające tyle samo zwolenników co przeciwników, ale znakomicie przedstawiające możliwości współczesnej elektroniki."

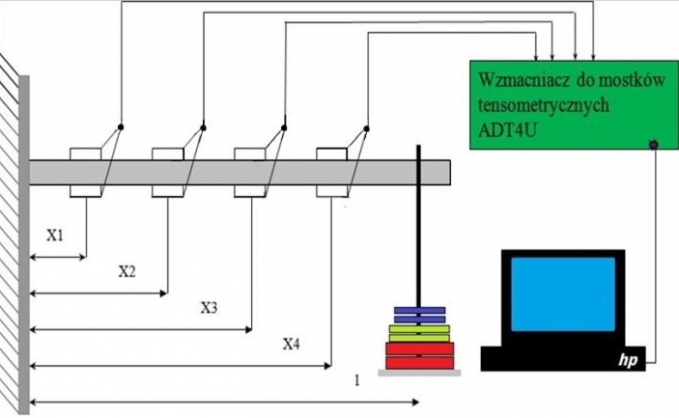
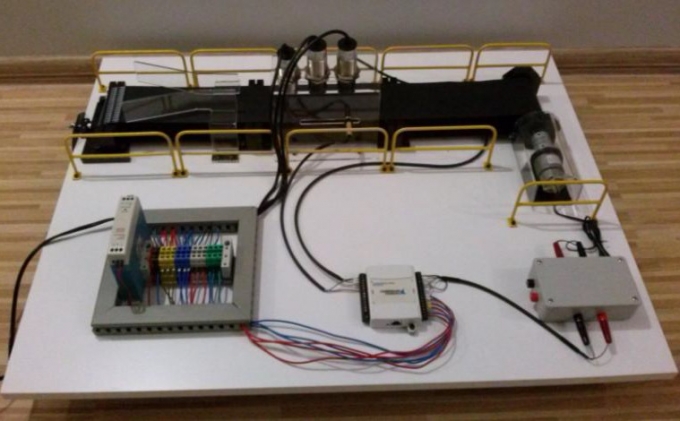
Dr inż. Tomasz Czyszpak pomagał podczas realizacji projektu nt. modernizacji stanowiska do pomiaru naprężeń i odkształceń belki utwierdzonej jednostronnie. Projekt zrealizował pan inż. Roland Gembalczyk. W celu realizacji projektu student musiał wykazać się znajomością zagadnień projektowych, problematyki konstruowania i wykorzystania mostków tensometrycznych oraz działania oprogramowania NX Nastram, ADT4U - PC.
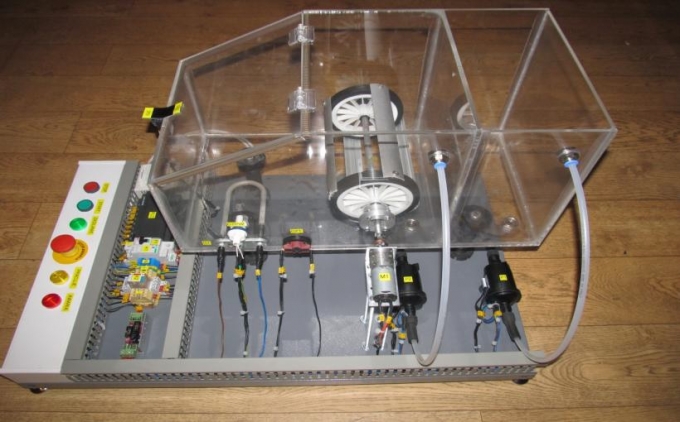
Pan inż. Sebastian Knapik (opiekun dr inż. Tomasz Czyszpak) zmierzył się z tematem: Zautomatyzowanie i modernizacja stanowiska laboratoryjnego do rozpoznawania kształtów wybranych elementów. Automatyzacja stanowiska polega na zaprojektowaniu i zbudowaniu taśmociągu, którego zadaniem był transport elementów pod czujniki indukcyjne w celu rozpoznania ich kształtów. Zatrzymywanie się elementów w odpowiednim miejscu pod czujnikami rozwiązanie zostało przez zastosowanie czujnika opto-refleksyjnego (bramka świetlna). Rozpoznawanie kształtu następowało poprzez wnioskowanie rozmyte zrealizowane w Matlabie.

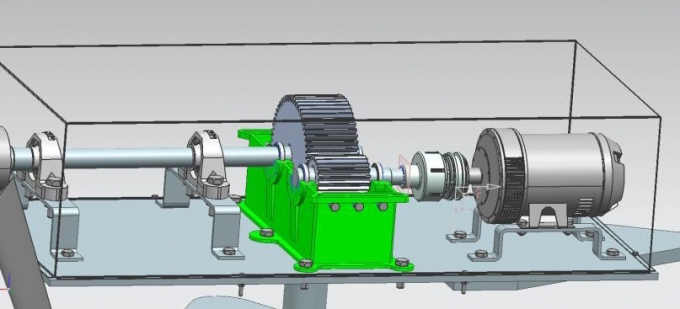
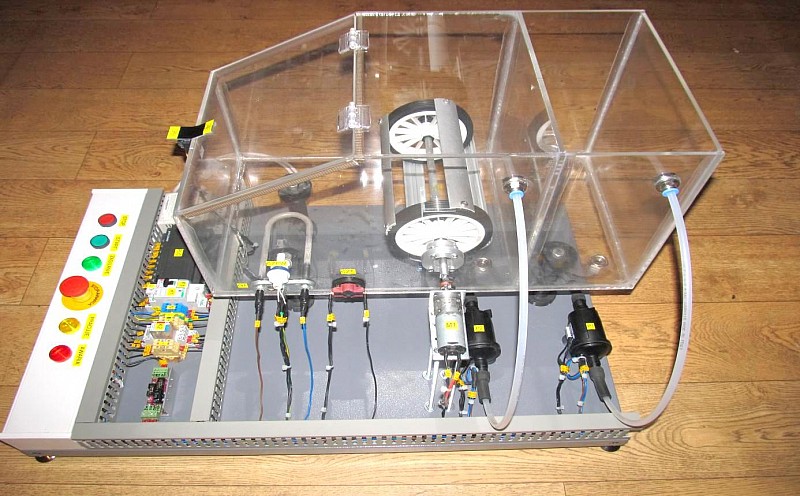
Pan inż. Szymon Zacharko pod opieką dr inż. Krzysztofa Herbusia wykonał projekt inżynierski pt.: Projekt przydomowej elektrowni wiatrowej. Celem pracy było zaprojektowanie oraz przedstawienie symulacji pracy przydomowej elektrowni wiatrowej o mocy 500W. Przeznaczeniem elektrowni jest podgrzewanie wody użytkowej. Taka moc urządzenia umożliwi podgrzanie 100 litrów wody od temperatury 150C do 450C przy maksymalnej mocy 500W w czasie 7 godzin.
Celem projektu inżynierskiego pana inż. Mateusza Kyrcz (opiekun dr inż. Piotr Kalus) było stworzenie modelu pralki automatycznej sterowanego za pomocą sterownika PLC, który umożliwia modyfikacje i udoskonalenia w programie. Projekt może stanowić doskonałą bazę do działań dydaktycznych i badawczych.

Pan inż. Marek Mika zajął się tematem projekt chwytaka podwójnego przeznaczonego do robota przemysłowego Kawasaki. Opiekunem projektu był dr inż. Grzegorz Gołda. W celu realizacji projektu należało zaprojektować chwytak podwójny w systemie klasy CAD, wykonanie modelu fizycznego chwytaka podwójnego oraz napisanie programu sterującego robotem przemysłowym Kawasaki FS03N w celu symulacji procesu chwytania i transportu obiektu manipulacji.
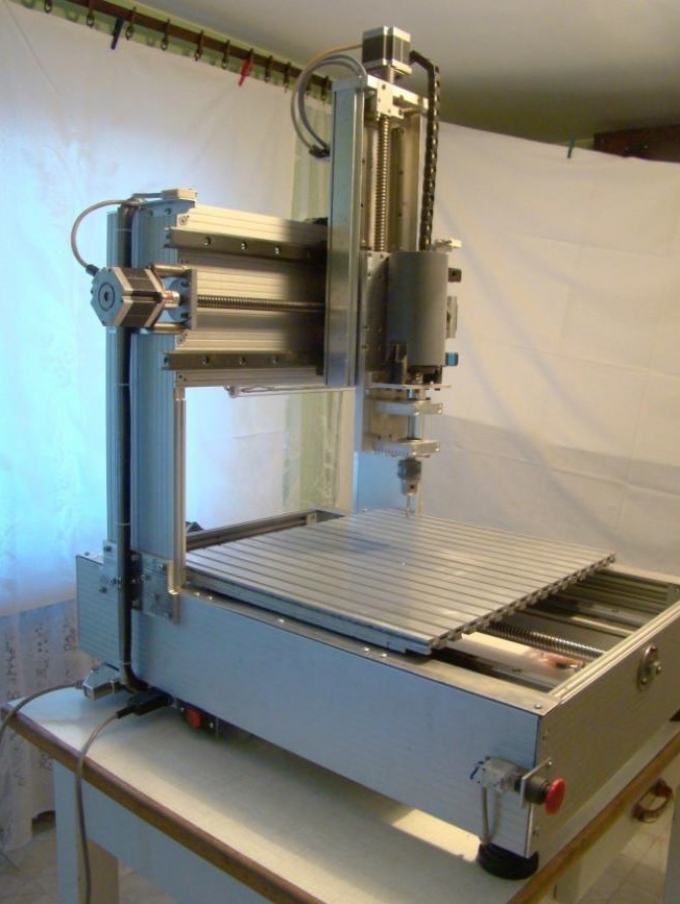
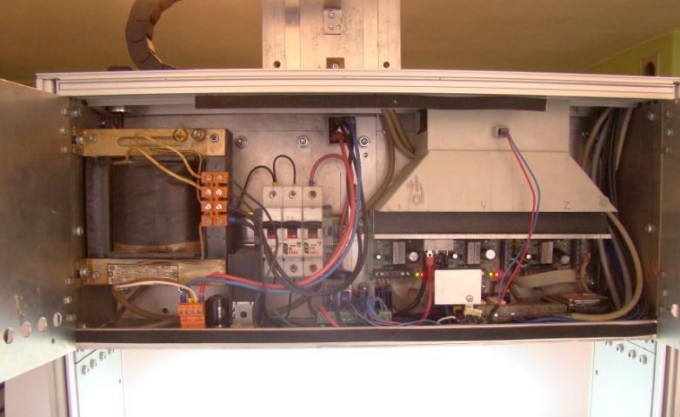
Pan inż. Patryk Bugdol zaprojektował i wykonał frezarkę CNC. Opiekunem projektu był dr hab. inż. Andrzej Baier. Głównymi założeniami tej pracy było wykonanie funkcjonalnego modelu frezarki CNC w programie NX6.0, montaż rzeczywistej frezarki oraz jej konfiguracja z programem Mach3.

Dr inż. Krzysztof Simek był opiekunem projektu realizowanego przez inż. Grzegorza Damka. Temat projektu to: linia sortowania wstępnego z czujnikiem koloru. Celem pracy było opracowanie projektu automatu do sortowania różnokolorowych obiektów jednakowej wielkości, z wykorzystaniem czujnika koloru i czujników zbliżeniowych. Ponadto w pracy przedstawiono sposoby detekcji koloru, a także omówiono wybraną metodę sortowania elementów.
Należy zaznaczyć, że nie są to wszystkie prace, lecz tylko wybrane, obrazujące szerokie zastosowanie automatyki, a jednocześnie duże możliwości podjęcia zatrudnienia przez absolwentów w licznych gałęziach przemysłu. W niedalekiej przyszłości kierunek automatyka i robotyka zmieni profil na profil praktyczny. Jednakże należy podkreślić, że już dzisiaj duża liczba zajęć jest prowadzona w formie laboratoriów, projektów oraz ćwiczeń. Naszym celem jest podążanie ścieżką dynamicznego rozwoju, stałe podnoszenie kompetencji i poziomu jakości kształcenia. Przyszłością kierunku automatyka i robotyka jest pozycja lidera na lokalnym rynku w dziedzinie kształcenia inżynierów. Wierzymy, że dzięki solidnej pracy całej kadry dydaktycznej, rzetelności oraz przede wszystkim dzięki ciężkiej pracy studentów z sukcesem zrealizujemy wszystkie plany.
Tomasz Czyszpak
Dyrektor Instytutu Techniki i Architektury
PWSZ Racibórz

Komentarze społecznościowe |
Zobacz także |

{kind=link}
Telegraf | Pokaż wszystkie » |